

CAPSTONE DESIGN SHOWCASE 2021
-
DAYS
-
HOURS
-
MINUTES
-
SECONDS
COMING SOON


Team members
Tan Jin Yuan (EPD), Ishika Kajaria (EPD), Edrea Tai Song Yi (EPD), Keenan Kuah Min Jun (ESD), Sheikh Salim Bin Mohamed Aneess Alrragi (ISTD), Soong Le Xuan (ISTD), Tan Shin Jie (ISTD)
Instructors:
Francisco Benita, Ye Ai, Oka Kurniawan, Sergey Kushnarev
Writing Instructors:
Teaching Assistant:
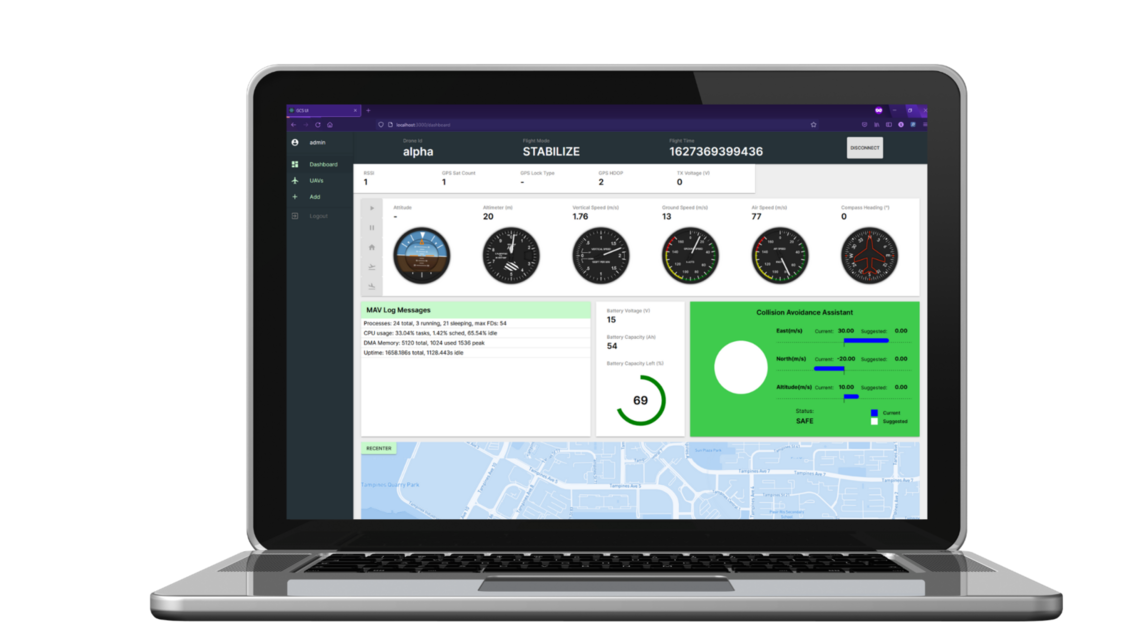
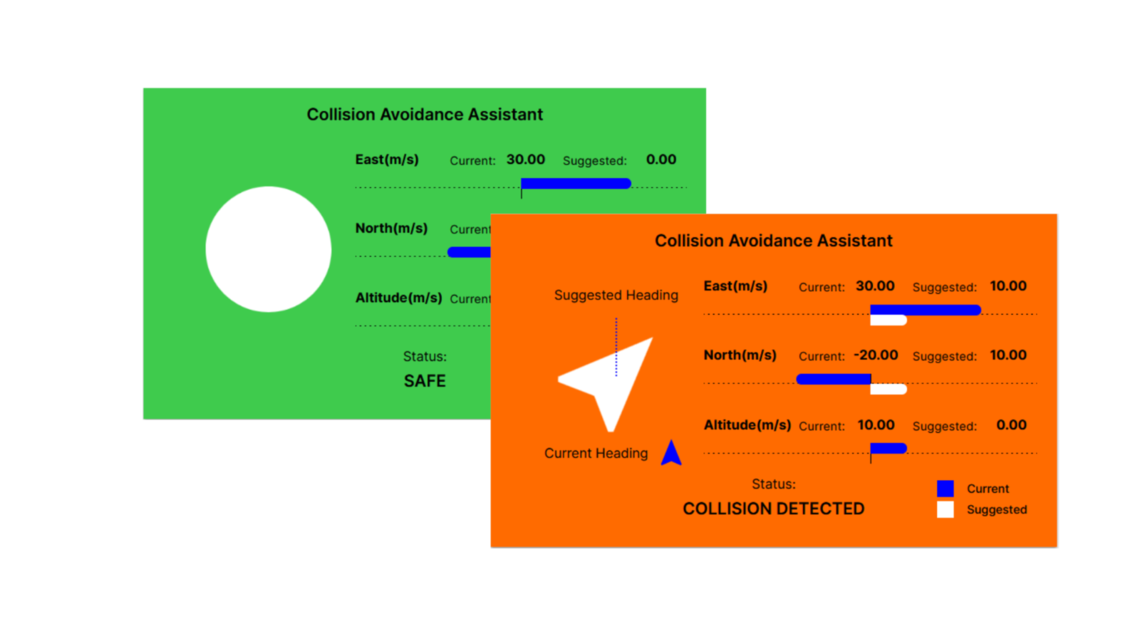


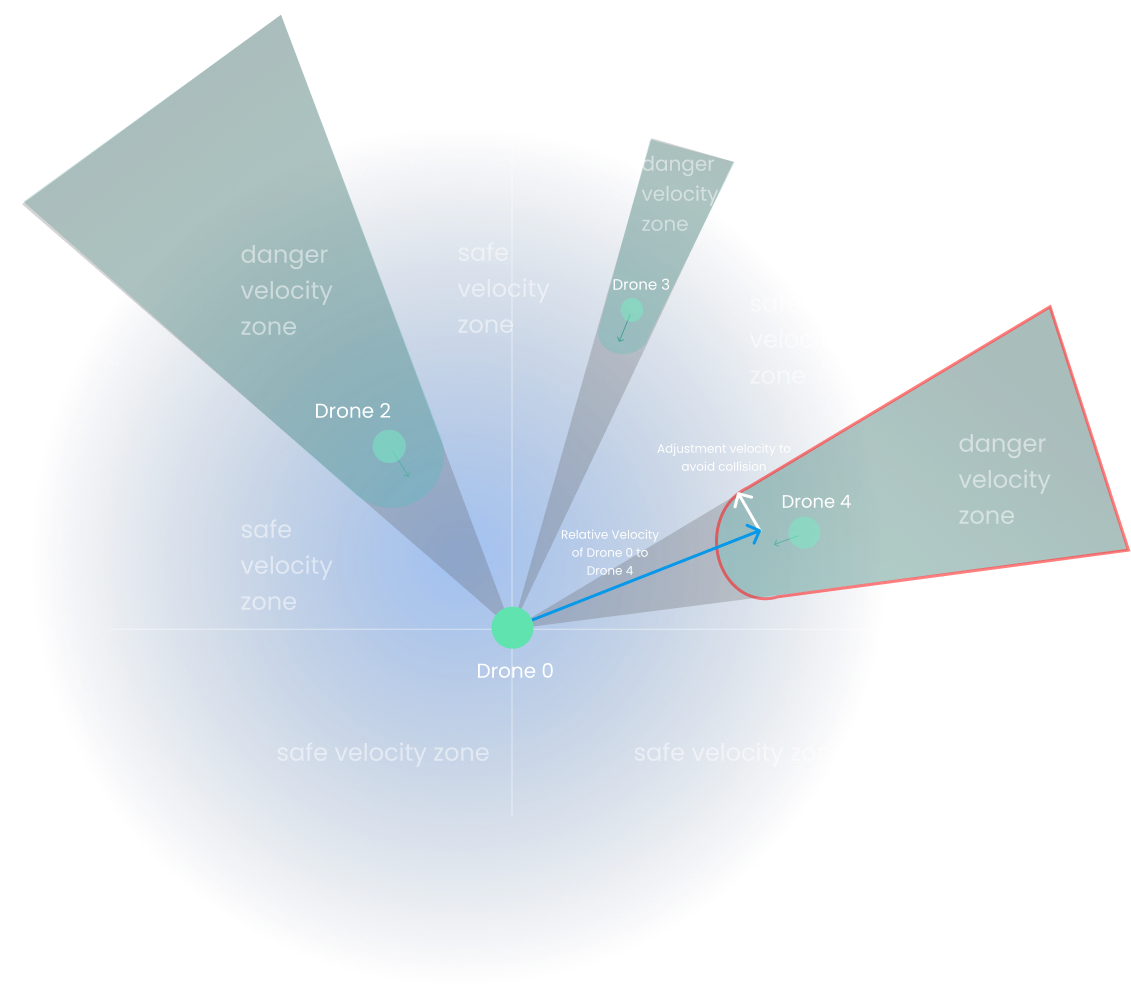
Optimal Reciprocal Collision Avoidance (ORCA) algorithm uses the idea of velocity obstacles and flight data from the onboard sensors to determine and detect a potential collision during flight.
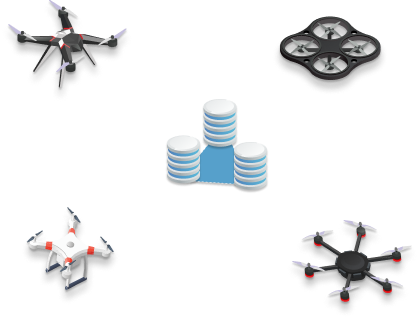
Inter-Drone Communication is achieved through cellular network and managed by a logical server that is responsible for nearby drones discovery. The database is powered by an open-sourced geospatial relational database management system, PostGIS.
 Tan Jin Yuan
Engineering Product Development
Tan Jin Yuan
Engineering Product Development
 Ishika Kajaria
Engineering Product Development
Ishika Kajaria
Engineering Product Development
 Edrea Tai Song Yi
Engineering Product Development
Edrea Tai Song Yi
Engineering Product Development
 Keenan Kuah Min Jun
Engineering Systems and Design
Keenan Kuah Min Jun
Engineering Systems and Design
 Sheikh Salim Bin Mohamed Aneess Alrragi
Information Systems Technology and Design
Sheikh Salim Bin Mohamed Aneess Alrragi
Information Systems Technology and Design
 Soong Le Xuan
Information Systems Technology and Design
Soong Le Xuan
Information Systems Technology and Design
 Tan Shin Jie
Information Systems Technology and Design
Tan Shin Jie
Information Systems Technology and Design
Tan Jin Yuan
Engineering Product Development
Ishika Kajaria
Engineering Product Development
Edrea Tai Song Yi
Engineering Product Development
Keenan Kuah Min Jun
Engineering Systems and Design
Sheikh Salim Bin Mohamed Aneess Alrragi
Information Systems Technology and Design
Soong Le Xuan
Information Systems Technology and Design
Tan Shin Jie
Information Systems Technology and Design